

Ερευνητές στο Ινστιτούτο Τεχνολογίας της Γεωργίας και στο Πανεπιστήμιο του Στάνφορντ έχουν αναπτύξει πρόσφατα το AlienGo, ένα τετράποδο ρομπότ που μπορεί να ακολουθήσει συγκεκριμένες διαδρομές που δημιουργούνται από τις δημόσιες υπηρεσίες χαρτών, ενώ παραμένει στα πεζοδρόμια και αποφεύγει τις συγκρούσεις με εμπόδια ή ανθρώπους. Αυτό το ρομπότ, που παρουσιάστηκε σε ένα έγγραφο που δημοσιεύτηκε προηγουμένως στο arXiv, βασίζεται σε ένα νέο εκπαιδευτικό πλαίσιο δύο σταδίων υψηλής απόδοσης για ασφαλή πλοήγηση στο πεζοδρόμιο.
“Ως μέρος αυτού του έργου, αναπτύξαμε ένα έξυπνο τετράποδο ρομπότ που μπορεί να περιηγηθεί στα πεζοδρόμια στον πραγματικό κόσμο”, δήλωσε στην TechXplore ο Sehoon Ha, ένας από τους ερευνητές που πραγματοποίησε τη μελέτη. “Η δουλειά μας είναι εμπνευσμένη από δύο στελέχη της υπάρχουσας εργασίας: Αυτόνομη οδήγηση και εσωτερική πλοήγηση με ρομπότ. Ωστόσο, καθώς η εξωτερική περιήγηση στο πεζοδρόμιο πραγματοποιείται συνήθως σε αδόμητα περιβάλλοντα με μεγάλη ποικιλία πεζών και εμπόδια χωρίς κανέναν οδηγό, προτείναμε επίσης ένα σύνολο των τεχνικών μάθησης και των αλγορίθμων για την επίλυση αυτών των συγκεκριμένων προκλήσεων».
Αρχικά, η ομάδα εκπαίδευσε ένα τεχνητό νευρωνικό δίκτυο για να περιηγηθεί σε απλά περιβάλλοντα πεζοδρομίων σε προσομοιώσεις. Αυτός ο πρώτος αλγόριθμος, που ονομάστηκε “εμπειρογνώμονας”, εκπαιδεύτηκε χρησιμοποιώντας έναν προσομοιωτή κόσμου υψηλής ταχύτητας και του δόθηκε πρόσβαση στη λεγόμενη “προνομιακή κατάσταση” της προσομοίωσης.
Στη συνέχεια, αυτό το δίκτυο “ειδικών” μετέφερε τη συμπεριφορά που έμαθε σε έναν αλγόριθμο “μαθητή” σε μια προσομοίωση υψηλής πιστότητας. Τελικά, αυτό το “φοιτητικό” δίκτυο παρήγαγε ρεαλιστικές παρατηρήσεις αισθητήρων που έμοιαζαν με πραγματικές εικόνες πεζοδρομίων.
“Ο” μαθητής “χρησιμοποιεί ένα προσαρμοσμένο εκπαιδευτικό δίκτυο σημασιολογικών χαρακτηριστικών για να δημιουργήσει αφαιρέσεις που αργότερα χρησιμοποιούνται για τον έλεγχο του ρομπότ”, δήλωσε ο Maks Sorokin, άλλος ερευνητής που συμμετείχε στη μελέτη, στο TechXplore. “Αυτή η προσέγγιση βασίζεται στην εμπειρία μας ότι η επιθυμητή συμπεριφορά είναι δύσκολο να επιτευχθεί χρησιμοποιώντας αφελείς από άκρη σε άκρη εκπαίδευση, απλά επειδή το πρόβλημα είναι πολύ δύσκολο”.
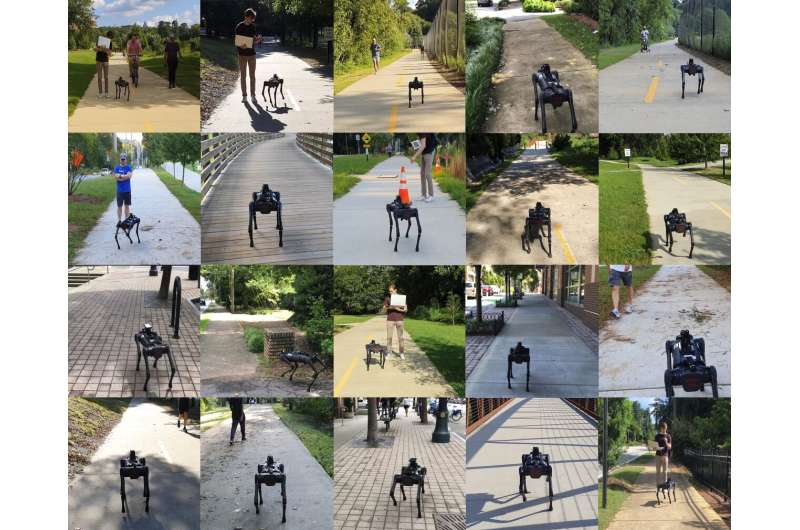
Χρησιμοποιώντας το πλαίσιο εκμάθησης δύο σταδίων που ανέπτυξαν, ο Ha, ο Sorokin και οι συνεργάτες τους μπόρεσαν να επιτύχουν μια αποτελεσματική πολιτική χρησιμοποιώντας “προνομιακές” πληροφορίες στην προσομοίωση και στη συνέχεια να μεταφέρουν τις συμπεριφορές που αποκτήθηκαν από το πλαίσιο σε ένα πραγματικό τετράποδο ρομπότ. Όταν η ομάδα αξιολόγησαν το πλαίσιο, διαπίστωσαν ότι ήταν καλύτερο από άλλα μοντέλα τελευταίας τεχνολογίας για πλοήγηση στο πεζοδρόμιο. Στη συνέχεια, επίσης, δοκίμασαν το πλαίσιο τους σε πραγματικό περιβάλλον, εφαρμόζοντάς το στο ρομπότ AlienGo καθώς περιηγούνταν στα πεζοδρόμια στην Ατλάντα.

“Εκτός από τα οφέλη απόδοσης από τη χρήση της μάθησης δύο σταδίων με τον αφηρημένο κόσμο, ήταν εκπληκτικό να δούμε πόσο εύκολη ήταν η μεταφορά στον πραγματικό κόσμο με τη διεύρυνση/επιμέλεια δεδομένων”, πρόσθεσε ο Sorokin. “Δεδομένου ότι κατά τη διάρκεια της εκπαίδευσης το ρομπότ δεν είδε ποτέ πραγματικές εικόνες πεζοδρομίων και έχοντας υπόψη όλες τις πολυπλοκότητες του πραγματικού κόσμου, η απόδοση χωρίς καμία προσαρμογή ήταν αξιοσημείωτη, το λιγότερο. Τα ευρήματά μας θα μπορούσαν να υπονοήσουν ότι πολλές πρόσφατες εργασίες Η εκμάθηση ρομποτικής θα μπορούσε να μεταφερθεί στον πραγματικό κόσμο και ελπίζουμε να χρησιμοποιηθεί πρακτικά προς όφελος της ανθρωπότητας».
Στο μέλλον, το τετράποδο ρομπότ που αναπτύχθηκε από αυτήν την ομάδα ερευνητών θα μπορούσε να χρησιμοποιηθεί για να ολοκληρώσει μια ποικιλία εργασιών, όπως η παράδοση δεμάτων ή η παρακολούθηση αστικών περιβαλλόντων. Επιπλέον, το πλαίσιο που ανέπτυξαν θα μπορούσε να εφαρμοστεί σε άλλα υπάρχοντα ή αναδυόμενα ρομπότ κινητών για να βελτιώσει την ικανότητά τους να κινούνται στην περιήγηση στα πεζοδρόμια.
“Ενώ κάναμε μεγάλη πρόοδο στη μεταφορά sim-to-real για πλοήγηση, απομένουν ακόμη πολλές προκλήσεις”, δήλωσε ο Sorokin. “Μερικές από τις προκλήσεις που σχετίζονται με την πλοήγηση που πρέπει ακόμη να ξεπεράσουμε περιλαμβάνουν οδική διέλευση, δυναμικό χειρισμό εμποδίων και αλληλεπίδραση με αντικείμενα και ανθρώπους του πραγματικού κόσμου. Ωστόσο, η προσέγγισή μας δεν περιορίζεται στην πλοήγηση, θα μπορούσε ενδεχομένως να εφαρμοστεί σε πολλά ρομποτικά εφαρμογές, όπως χειραγώγηση, μετακίνηση και άλλες. Είμαστε ενθουσιασμένοι που βλέπουμε τις εφαρμογές του σε παρακείμενες ερευνητικές περιοχές. “

Ακολουθήστε μας στα κοινωνικά δίκτυα facebook, twitter, instagram, και στο Google news. Διαβάστε την e-enimerosi.com για να ενημερώνεστε για όλα τα νέα, από την Ελλάδα και τον κόσμο, κάνετε εγγραφή στην σελίδα και πατήστε το καμπανάκι για να ενημερώνεστε πρώτοι έγκαιρα και έγκυρα.